 Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.

 Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.



Autor: dr inż. Panasiuk Jarosław, ppłk dr inż. Wojciech Kaczmarek
Wydawnictwo: Wydawnictwo Naukowe PWN
Stron: 250
Data wydania: 2017-10-17
Typ: książka
Druk: tak
Wersja elektroniczna: nie
ISBN:
978-8-30-119548-9
17-10-2017
16.5 x 23.5 cm
nie
nie
nie
Unikatowa publikacja, kolejna z serii książek o ROBOTYCE, która w przystępny sposób przedstawia praktyczne aspekty wykorzystania najnowszych technologii automatyki i robotyki w procesach przemysłowych.
Czytelnik znajdzie w niej m.in. następujące informacje:
Publikację kierujemy do szerokiego grona odbiorców: zarówno do studentów uczelni technicznych, studiujących na kierunkach typu: Automatyka i robotyka, Mechatronika, Zarządzanie i inżynieria produkcji, Informatyka przemysłowa itp., ale też do praktyków – inżynierów, integratorów automatyki, programistów robotów, specjalistów z branży motoryzacyjnej, spożywczej i wielu innych.
Spis treści
1. Wprowadzenie
2. Pojęcia podstawowe
2.1. Definicje robotów
2.2. Zastosowania specjalne robotów
2.3. Robotyka przemysłowa a automatyzacja
2.4. Klasyfikacja robotów przemysłowych
2.5. Budowa robotów przemysłowych
2.6. Parametry robotów przemysłowych
2.7. Wybrane konstrukcje robotów przemysłowych
2.7.1. Roboty przegubowe pięcio- i sześcioosiowe
2.7.2. Roboty o budowie równoległej
2.7.3. Roboty typu SCARA
2.7.4. Roboty portalowe
2.7.5. Roboty dwuramienne
2.7.6. Roboty kolaboracyjne
2.8. Układy współrzędnych robotów przemysłowych
3. Efektory robotów przemysłowych
3.1. Chwytaki
3.2. Narzędzia robotów
3.3. Systemy wymiany narzędzi
4. Czujniki i układy sensoryczne robotów przemysłowych
4.1. Czujniki pomiarowe
4.2. Systemy wizyjne
5. Wykorzystanie robotów przemysłowych w wybranych aplikacjach
5.1. Zalety robotyzacji
5.2. Zrobotyzowane stanowiska spawalnicze
5.3. Pakowarki vs. roboty
5.4. Nowe rynki dla robotyki
5.5. Praca w niebezpiecznych
5.6. Stały rozwój robotyzacji
6. Analiza procesów zrobotyzowanego sortowania, pakowania i paletyzacji
6.1. Projektowanie zrobotyzowanego stanowiska do sortowania, pakowania i paletyzacji produktów
6.2. Budowa stanowiska sortowania, pakowania i paletyzacji
6.2.1. Zrobotyzowane sortowanie produktów
6.2.2. Zrobotyzowane pakowanie produktów
6.2.3. Zrobotyzowana paletyzacja produktów
6.3. Bezpieczeństwo i środowisko pracy na stanowiskach sortowania, pakowania i paletyzacji
6.4. Przykłady zrobotyzowanych stanowisk pakowania i paletyzacji
7. Zrobotyzowane procesy spawania, zgrzewania, cięcia oraz spawania laserowego
7.1. Zrobotyzowane procesy spawania łukowego
7.2. Zrobotyzowane procesy zgrzewania
7.3. Przykłady zrobotyzowanych stanowisk zgrzewalniczych
7.4. Zrobotyzowane procesy cięcia i spawania laserowego
7.5. Podsumowanie
8. Zrobotyzowana obsługa maszyn
8.1. Zrobotyzowana obsługa centrów obróbczych
8.2. Zrobotyzowana obsługa stanowisk obróbki plastycznej
9. Zrobotyzowany montaż
9.1. Rodzaje gniazd montażowych
9.2. Podsumowanie
10. Sterowniki PLC na zrobotyzowanych stanowiskach produkcyjnych
10.1. Miejsce sterowników PLC w przemyśle
10.2. Budowa, działanie i programowanie sterowników PLC
10.3. Imigracja sterowników do kontrolerów robotów
10.3.1. Przykłady rozwiązań
10.4. Podsumowanie
11. Systemy bezpieczeństwa na stanowiskach zrobotyzowanych
11.1. Bezpieczeństwo maszyn w aspekcie wymagań zawartych w normach
11.2. Kategorie bezpieczeństwa
11.3. Bezpieczeństwo w zrobotyzowanej komorze produkcyjnej
11.4. Systemy bezpieczeństwa a systemy sterowania robotów przemysłowych
11.5. Podsumowanie
12. Rynek robotyki, przegląd nowych rozwiązań i trendów
12.1. Gęstość robotyzacji
12.2. Prognozy rozwoju robotyzacji
12.3. Główne czynniki mające wpływ na rozwój robotyzacji
12.4. Trendy rozwoju robotów przemysłowych
12.4.1. Konstrukcje manipulatorów
12.4.2. Generacje kontrolerów
12.4.3. Rozwój paneli operatorów – paneli Teach Pendant
12.4.4. Rozwój systemów bezpieczeństwa robotów przemysłowych
12.4.5. Rozwój środowisk do programowania robotów przemysłowych
12.4.6. Zintegrowane systemy do szybkiego wdrożenia
13. Bibliografia
Przypisy
W naszym serwisie możesz złożyć zapytanie do wielu firm.
Zapytanie możesz wysłać bezpośrednio do firmy lub o wybrany produkt a nawet całą kategorię produktów.
Poniżej w kilku krokach pokazujemy jak wysłać zapytanie.

1. Skorzystaj z wyszukiwarki wpisując czego szukasz.
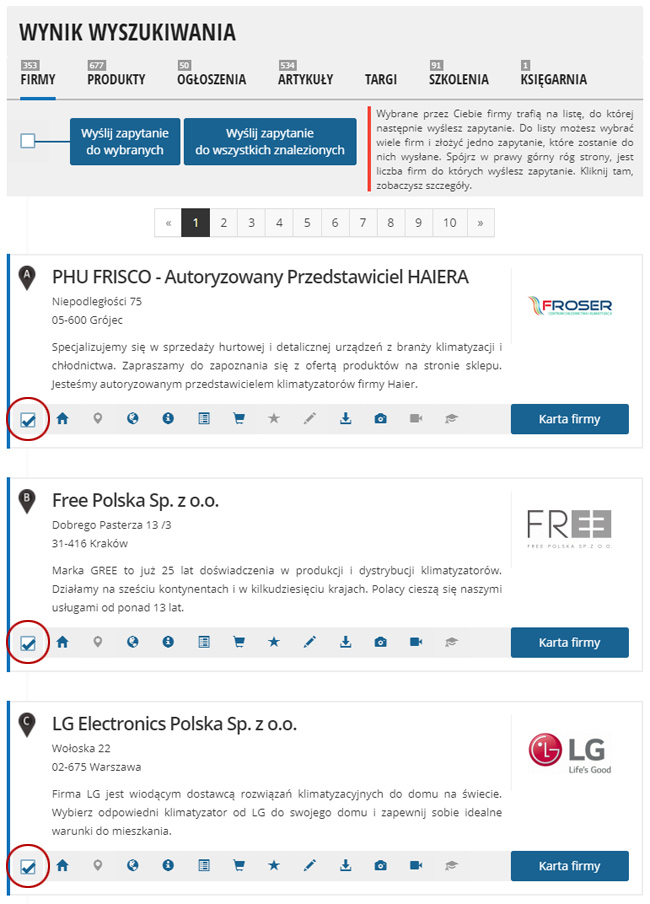
2. Zaznacz na liście wyniku wyszukiwania wybrane pozycje.
Możesz także wejść bezpośrednio do katalogu firm lub katalogu produktów i dokonać wyboru.

3. Twój wybór będzie pokazany w górnym pasku portalu. Najedź myszką i kliknij.
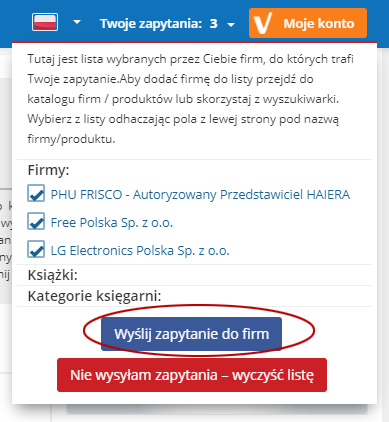
4. Następnie kliknij przycisk „Wyślij zapytanie do firm”.
5. Jeżeli nie jesteś zalogowany to włączy się strona z możliwością wyboru w jaki sposób chcesz korzystać z serwisu.
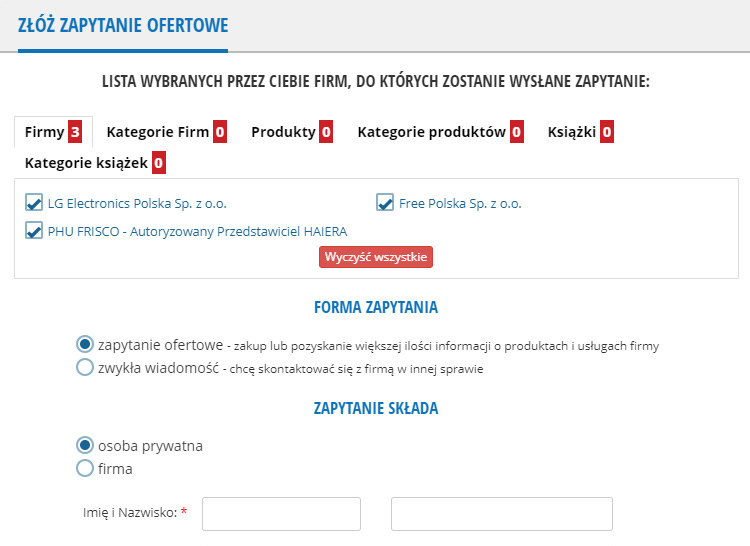
6. Włączy się formularz składania zapytania.
Miejsca, do których składasz zapytania zostały podzielone na zakładki. Na czerwono podświetlone są liczby wybranych firm, produktów itd. Tutaj możesz jeszcze dokonać zmian wyboru.
Wpisz swoje zapytanie, podaj dane kontaktowe i wyślij.
7. My roześlemy Twoje zapytanie do wybranych przez Ciebie firm, a Ty czekaj na odpowiedzi.
8. Chcesz złożyć zapytanie? Kliknij tutaj i wpisz czego szukasz.




