 Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.

 Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.



28-06-2013, 00:00
...umożliwiając swoim robotom pracę przy małych i delikatnych przedmiotach
 |
Universal Robots, duński producent uniwersalnych robotów, optymalizuje funkcjonalność swoich produktów. Dzięki aktualizacji oprogramowania 1.7 roboty UR5 i UR10 są jeszcze łatwiejsze w obsłudze. Kontrola siły umożliwia bezpieczną obsługę nawet delikatnych i łatwo tłukących się przedmiotów. Aktualizacja oprogramowania obejmuje zarówno dotychczasowych użytkowników, jak i nowych klientów.
Udostępniona niedawno aktualizacja oprogramowania 1.7 do obu sześcioosiowych robotów UR5 i UR10 zawiera wiele nowości, które poszerzają ich funkcjonalność. Jedną z nich jest możliwość poruszania przedmiotów z kontrolowaną regulacją siły. W ten sposób można ustawiać optymalną siłę potrzebną do wykonania danego zadania. Robot rozpoznaje wielkość, oraz elastyczność obiektów i na tej podstawie różnicuje siłę potrzebną do pracy („wyczuwa” siłę od 25 niutonów). Dla każdego z sześciu przegubów wymagana siła może być programowana z dokładnością do ±10 niutonów przy precyzji pozycjonowania ±5 milimetrów.
Firma Universal Robots zaktualizowała graficzny interfejs w panelach dotykowych. Dostępne są nowe czcionki, które zapewniają lepszą czytelność. Możliwe jest również ustawianie i wyświetlanie na panelu daty i godziny. Ustawione współrzędne punktów ruchu są teraz łatwiejsze do znalezienia, dzięki czemu zmiany w programowaniu mogą być wprowadzane jeszcze łatwiej.
 |
„Staramy się na bieżąco udoskonalać i aktualizować nasze roboty, aby zapewnić klientom jak największy komfort użytkowania. Mamy nadzieję, że bieżąca aktualizacja oprogramowania zwiększy uniwersalność i elastyczność ich wykorzystania“ - wyjaśnia Svetlana Vinogradova, Area Sales Manager Universal Robots.
Dwuramienny robot obsługuje nawet delikatne przedmioty Universal Robots poszerzył również funkcjonalność swojego serwera Modbus. Dzięki nowej architekturze master/slave można programować i obsługiwać wiele ramion robotów UR jednocześnie za pomocą jednego ekranu dotykowego.
Właśnie do tego celu Universal Robots stworzył dwuramiennego robota. Z systemem dwuramiennym mogą być bowiem wykorzystywane seryjne modele robotów UR5 i UR10. Dzięki aktualizacji oprogramowania, oba roboty posiadają dwanaście osi z możliwością obrotu o 360 stopni każda. Mogą w kontrolowany sposób przenosić i odbierać elementy. W zależności od podnoszonego obiektu nie jest do tego potrzebny chwytak. Dzięki temu automatyzacja określonych procesów jest jeszcze łatwiejsza i tańsza. „Na modelu dwuramiennym chcemy pokazać, co potrafią nasze roboty. Taki system może być wykorzystywany na przykład do obsługi owoców wrażliwych na ściskanie czy materiałów łatwo tłukących się, takich jak szkło czy porcelana“ – podsumowuje Svetlana Vinogradova.
Podobne artykuły
Komentarze
W naszym serwisie możesz złożyć zapytanie do wielu firm.
Zapytanie możesz wysłać bezpośrednio do firmy lub o wybrany produkt a nawet całą kategorię produktów.
Poniżej w kilku krokach pokazujemy jak wysłać zapytanie.

1. Skorzystaj z wyszukiwarki wpisując czego szukasz.
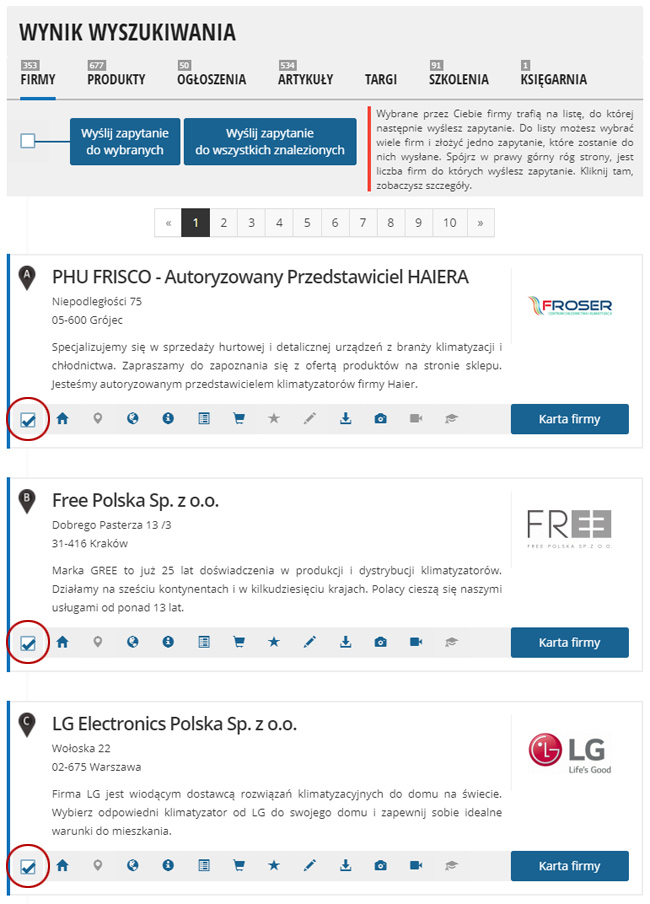
2. Zaznacz na liście wyniku wyszukiwania wybrane pozycje.
Możesz także wejść bezpośrednio do katalogu firm lub katalogu produktów i dokonać wyboru.

3. Twój wybór będzie pokazany w górnym pasku portalu. Najedź myszką i kliknij.
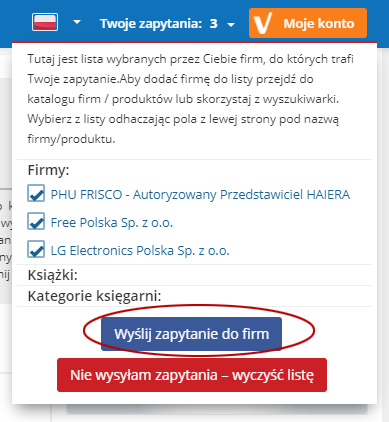
4. Następnie kliknij przycisk „Wyślij zapytanie do firm”.
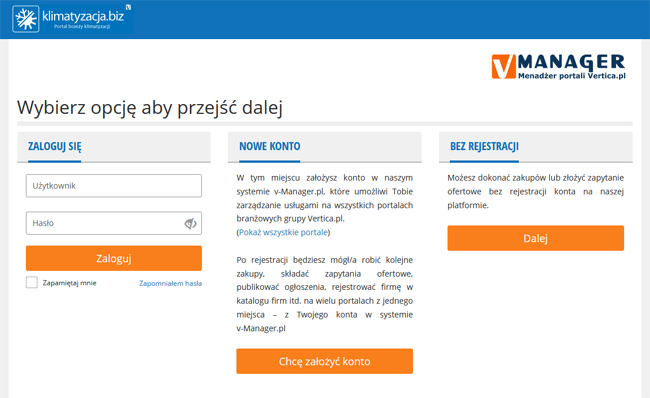
5. Jeżeli nie jesteś zalogowany to włączy się strona z możliwością wyboru w jaki sposób chcesz korzystać z serwisu.
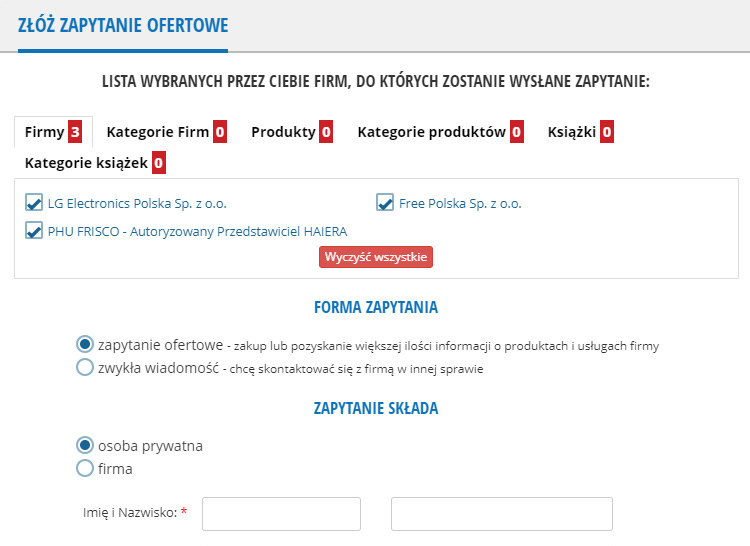
6. Włączy się formularz składania zapytania.
Miejsca, do których składasz zapytania zostały podzielone na zakładki. Na czerwono podświetlone są liczby wybranych firm, produktów itd. Tutaj możesz jeszcze dokonać zmian wyboru.
Wpisz swoje zapytanie, podaj dane kontaktowe i wyślij.
7. My roześlemy Twoje zapytanie do wybranych przez Ciebie firm, a Ty czekaj na odpowiedzi.
8. Chcesz złożyć zapytanie? Kliknij tutaj i wpisz czego szukasz.









